1. Fazer o download do IDE do arduino
2. Instalar o IDE
3. Instalar os drivers do arduino e o Ardublocky
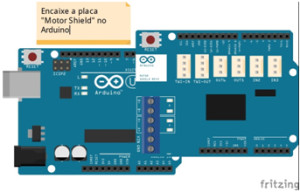
4. Encaixar a “motor shield” na placa arduino
5. Fazer as ligações como está indicado no esquema ao lado.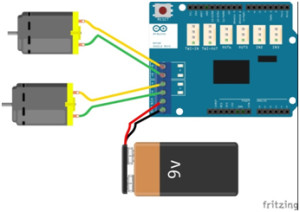

(Vídeo com a Instalação do Ardublokly para o Anprino e teste dos motores)

6. Carregar o programa para testar a ordem e polaridades dos motores (programa para afinar os motores: testemotor_v1)
Notas importantes:
Se algum dos motores andar em sentido contrário, deve inverter os fios desse motor.
Se a direção da Robot Anprina Nandy estiver ao contrário, ou seja, em vez de ir para a direita vai para a esquerda, deve trocar os fios do motor A com os do motor B.
7. O movimento da Robot Anprina Nandy deve seguir o seguinte diagrama:
Quando a Robot Anprina Nandy estiver a movimentar-se corretamente, o trabalho de acerto e afinação está concluído.
 (Vídeo para Configurar a Grove Base Shield)
(Vídeo para Configurar a Grove Base Shield)
8. Configurar o sensor de ultra-sons da Anprina Nandy (programa ultra-sons: nandy_v1).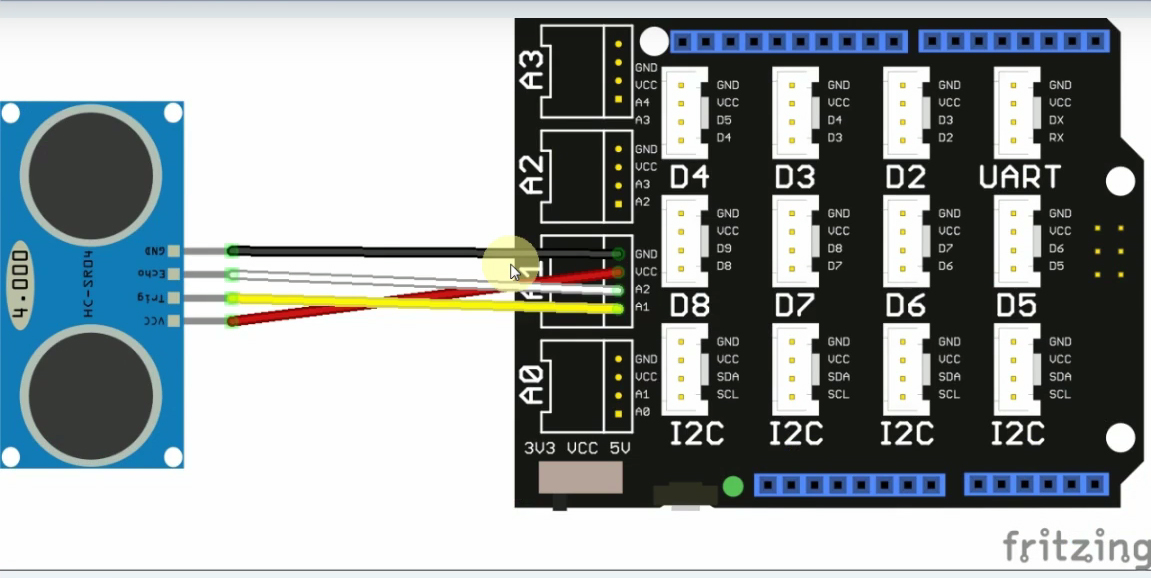
 (Vídeo com a Configuração do Sensor de ultra-sons da Anprina Nandy).
(Vídeo com a Configuração do Sensor de ultra-sons da Anprina Nandy).