Lançamos aqui um desafio à comunidade de utilizadores do Robot Anprino: e porque não partilhar as vossas atividades? Cenários, situações-problema, projetos em que o robot Anprino esteja nas mãos dos alunos. Estamos abertos a novas ideias, e queremos ajudar a disseminar práticas. Se tiverem propostas ou registos de atividade, enquadradas, façam-nas chegar através do endereço de email artur.coelho@anpri.pt, para que partilhemos com a comunidade. Porque juntos, aprendemos mais e melhor!
Iniciamos a partilha com o cenário de aprendizagem Robot Anprino Pintor. Foi desenvolvido no âmbito do Curso Pós-graduado Especialização em Tecnologias e Metodologias da Programação no EB do Instituto de Educação da Universidade de Lisboa, nas disciplinas de Programação de Objetos Tangíveis e Seminário de Investigação e Projeto. O cenário foi aplicado com alunos de 5.º ano de escolaridade, do clube de robótica do Agrupamento de Escolas Venda do Pinheiro, que se divertiram imenso a programar o nosso Anprino para pintar. Pode ser utilizado em contextos interdisciplinares e de flexibilidade curricular com contributos diretos das áreas de TIC, Educação Visual, Educação Tecnológica, e Matemática. Este projeto foi inspirado no trabalho de vanguarda inovadora do artista plástico Leonel Moura. Para além do estímulo à aprendizagem de robótica e programação, pode levar os alunos envolvidos a refletir sobre as questões na fronteira entre tecnologia, arte e estética que o trabalho de Leonel Moura levanta.
Cenário de Aprendizagem: Robot Anprino Pintor
Área/domínio conhecimento:
Tecnologias de Informação e Comunicação: Programação e Robóticas.
Educação Visual: Arte Contemporânea.
Nível de ensino:
2º ciclo (5º ano – algoritmos e pensamento computacional; 6º ano – programação de objetos tangíveis). Pode ser adaptado a outros níveis de ensino, abordando temáticas ligadas à mecânica, programação, robótica, expressão plástica, história de arte e pensamento artístico.
Título:
Robot Anprino Pintor
Objetivos:
Utilizar a plataforma Robot Anprino para desenvolver robots pintores que, através de programação, criem desenhos em papel.
Desenvolver competências de programação de objetos tangíveis.
Cruzar artes visuais com tecnologias digitais, com foco na arte contemporânea.
Abrir espaço a reflexão estética sobre temáticas da geometria, desenho, arte digital, robótica, inteligência artificial, caos e aleatoriedade.
Questionar o conceito tradicional de arte como algo de exclusivamente humano e afastado de meios de expressão digital.
Conhecer práticas artísticas contemporâneas no cruzamento entre arte e tecnologia, a partir do trabalho do artista plástico Leonel Moura (bebots, robots pintores).
Contexto/ambiente/narrativa:
Vamos ensinar um robot a pintar? Usando programação, como conseguimos fazer com que um robot crie desenhos? E de quem será a autoria desses desenhos, do robot, ou de quem o programou? Poderão robots ser meio de expressão plástica?
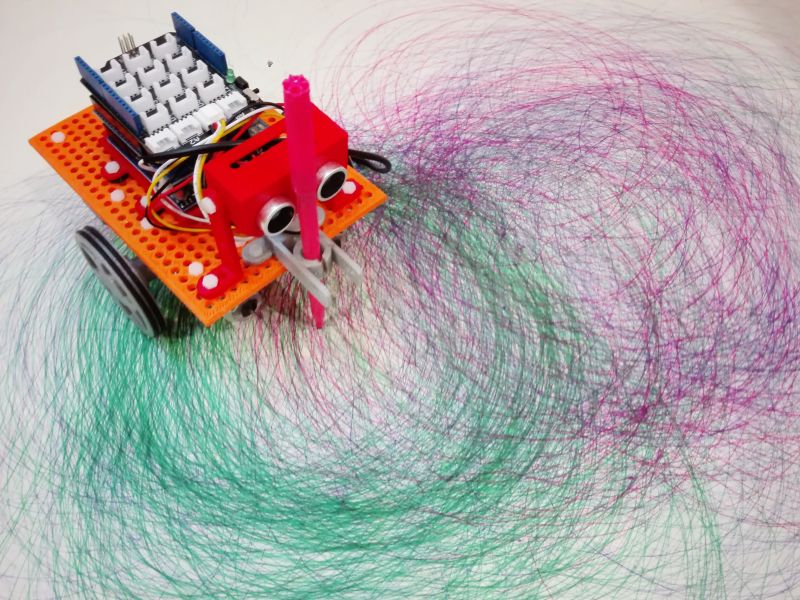
Com base nesta premissa, um grupo de alunos que frequenta o clube de robótica do Agrupamento de Escolas Venda do Pinheiro foram desafiados a aprender a programar o robot Anprino, para posteriormente desenvolverem programas que, executados ao longo de várias horas e com materiais riscadores acoplados ao robot, criaram padrões sucessivos em papel de cenário. O ponto de partida para estes robots pintores era o introduzir de aleatoriedade nos tempos de movimento definidos pelas condições. Os alunos preferiram explorar a possibilidade de traçado de padrões geométricos.
Recursos e materiais:
Recursos:
Robot anprino modelo Nandy (ou qualquer outro modelo, montando sensor de ultrasons)
Adaptador para caneta
Materiais riscadores
Papel de cenário
Módulos de pavimentação (para restringir os movimentos do robot)
Cabo USB
Computador
Software:
Ardublockly para Anprino
Arduino IDE e biblioteca Ultrasonic Master
Avaliação:
Programas criados pelos alunos (ficheiros .ino da IDE arduino ou xml do Ardublockly);
Registo da evolução dos alunos da programação em blocos para IDE arduino;
Complexidade dos programas desenvolvidos;
Capacidade de desenvolvimento de diferentes padrões de movimentos (aleatório, padrões geométricos);
Pinturas produzidas pelos robots.
Enredo e sequência de atividades:

Sequência:
1. Introdução à programação do Robot Anprino: criar programas com blocos para movimentos simples (andar em direção frente/atrás, virar).
2. Programação do robot Anprino para descrever figuras geométricas: estudar a relação entre tempo e velocidade no movimento do robot; desenvolver algoritmos que levem o robot a movimentar-se descrevendo figuras geométricas.
3. Programação de algoritmos de desenho aleatório para criação de padrões e pintura: inserir elementos de aleatoriedade (sorteio de números, comparações lógicas) em blocos de ciclo ou tempo.
4. Produção de desenhos criados pelo robot: utilizando um recinto fechado com módulos de pavimentação, materiais riscadores e papel de cenário, testar os programas deixando o robot em movimento durante algumas horas. Selecionar materiais riscadores com cores específicas (contrastes de cor, cores análogas) para controlar o efeito visual final.
5. Enquadramento com prática artística de Leonel Moura: apresentar o trabalho BeBots – Robots Pintores, comparando-os com o trabalho desenvolvido pelos alunos. Esta fase encerra o projeto, para que o contato com experiências estéticas contemporâneas seja enquadrado com o projeto de programação. Se esta fase for colocada no início, poderá haver o risco dos alunos quererem replicar o trabalho artístico, o que não é o que se pretende.
Esta atividade pressupõe conhecimentos prévios de programação utilizando linguagens por blocos. Tempo: sugere-se um bloco de 50 minutos para as fases 1, 2,3 e 5. A produção dos desenhos pelos robots requer que funcionem durante algumas horas, se for essa a escolha estética tomada pelos alunos.
Competências:

Referência do quadro de competências europeu: Competências matemáticas e no domínio das ciências, tecnologia e engenharia; competências digitais; competências de sensibilidade e expressão culturais.
Perfil dos alunos à saída da Escolaridade Obrigatória:
Embora as competências definidas no perfil dos alunos se interrelacionem em profundidade, esta atividade incide especialmente nas áreas que em seguida se destacam.
Informação e comunicação: colaborar em diferentes contextos comunicativos, de forma adequada e segura, utilizando diferentes tipos de ferramentas (analógicas e digitais), com base nas regras de conduta próprias de cada ambiente.
Raciocínio e resolução de problemas: gerir projetos e tomar decisões para resolver problemas; desenvolver processos conducentes à construção de produtos e de conhecimento, usando recursos diversificados.
Pensamento crítico e pensamento criativo: desenvolver novas ideias e soluções, de forma imaginativa e inovadora, como resultado da interação com outros ou da reflexão pessoal, aplicando-as a diferentes contextos e áreas de aprendizagem.
Sensibilidade estética e artística: reconhecer as especificidades e as intencionalidades das diferentes manifestações culturais; experimentar processos próprios das diferentes formas de arte; apreciar criticamente as realidades artísticas, em diferentes suportes tecnológicos,
pelo contacto com os diversos universos culturais.
Saber científico, técnico e tecnológico: manipular e manusear materiais e instrumentos diversificados para controlar, utilizar, transformar, imaginar e criar produtos e sistemas; executar operações técnicas, segundo uma metodologia de trabalho adequada, para atingir um objetivo ou chegar a uma decisão ou conclusão fundamentada, adequando os meios materiais e técnicos à ideia ou intenção expressa; adequar a ação de transformação e criação de produtos aos diferentes contextos naturais, tecnológicos e socioculturais, em atividades experimentais, projetos e aplicações práticas desenvolvidos em ambientes físicos e digitais.
Atividades de extensão/ desfecho/produto(s):
Cenário base: criar pequenos programas de movimento repetitivo para o robot anprino.
Expansões: explorar motivos geométricos; controlar colocação da caneta no papel (subir/descer de acordo com programação); usar leds para efeitos de fotografia de longa exposição; algoritmos de decisão autónomos para o robot pintor.
Disciplinas envolvidas:

Tecnologias de Informação e Comunicação
Domínios:
INVESTIGAR E PESQUISAR: Utilizar o computador e outros dispositivos digitais, de forma a permitir a organização e gestão da informação; COMUNICAR E COLABORAR: Selecionar as soluções tecnológicas, mais adequadas, para realização de trabalho colaborativo e comunicação que se pretendem efetuar no âmbito de atividades e/ou projetos; Apresentar e partilhar os produtos desenvolvidos utilizando meios digitais de comunicação e colaboração em ambientes digitais fechados: CRIAR E INOVAR: Conhecer as potencialidades de diferentes aplicações digitais, por exemplo, de escrita criativa, explorando ambientes de programação; Compreender o conceito de algoritmo e elaborar algoritmos simples; Analisar algoritmos, antevendo resultados esperados e/ou detetando erros nos mesmos; Elaborar algoritmos no sentido de encontrar soluções para problemas simples (reais ou simulados), utilizando aplicações digitais, por exemplo: ambientes de programação, mapas de ideias, murais, blocos de notas, diagramas e brainstorming online; Produzir artefactos digitais criativos, para exprimir ideias, sentimentos e conhecimentos, em ambientes digitais fechados.
Educação Tecnológica
Domínios:
RECURSOS E UTILIZAÇÕES TECNOLÓGICAS: Investigar, através de experiências simples, algumas características de materiais comuns (dureza, flexibilidade, resistência, elasticidade, plasticidade). Manipular operadores tecnológicos (de energia, movimento/mecanismos, estruturas resistentes) de acordo com as suas funções, princípios e relações com as produções tecnológicas. Identificar fontes de energia e os seus processos de transformação (elétrico, térmico, mecânico e sonoro), relacionando-as com soluções tecnológicas aplicáveis aos projetos. Colaborar nos cuidados com o seu corpo e no cumprimento de normas de higiene e segurança na utilização de recursos tecnológicos.
Educação Visual
Domínios:
APROPRIAÇÃO E REFLEXÃO: Reconhecer a tipologia e a função do objeto de arte, design, arquitetura e artesanato de acordo com os contextos históricos, geográficos e culturais. Descrever com vocabulário adequado (qualidades formais, físicas e expressivas) os objetos artísticos. INTERPRETAÇÃO E COMUNICAÇÃO: Compreender os significados, processos e
intencionalidades dos objetos artísticos; Expressar ideias, utilizando diferentes meios e processos (pintura, escultura, desenho, fotografia, multimédia, entre outros);
EXPERIMENTAÇÃO E CRIAÇÃO: Utilizar diferentes materiais e suportes para realização dos seus trabalhos; Manifestar capacidades expressivas e criativas nas suas produções, evidenciando os conhecimentos adquiridos; Desenvolver individualmente e em grupo projetos de trabalho, recorrendo a cruzamentos disciplinares (artes performativas, multimédia, instalações, happening, entre outros); Justificar a intencionalidade dos seus trabalhos, conjugando a organização dos elementos visuais com ideias e temáticas, inventadas ou sugeridas.
Matemática
Domínios:
GEOMETRIA E MEDIDA: Figuras planas e sólidos geométricos; Medida: Descrever figuras no plano e no espaço com base nas suas propriedades e nas relações entre os seus elementos e fazer classificações explicitando os critérios utilizados; Exprimir a amplitude de um ângulo em graus e identificar ângulos complementares, suplementares, adjacentes,
alternos internos e verticalmente opostos; Utilizar os critérios de igualdade de triângulos na sua construção e na resolução de problemas em contextos matemáticos e não matemáticos; Reconhecer casos de possibilidade de construção de triângulos e construir triângulos a partir de elementos dados (amplitude de ângulos, comprimento de lados).
Notas de apoio à sua implementação:

De momento, o robot anprino não dispõe de forma de acoplar materiais riscadores com dispositivos que permitam elevar/baixar caneta. A peça concebida para este projeto adapta-se à medida dos marcadores comuns.
Requer que o programa corra no robot durante várias horas para mostrar padrões gráficos complexos.
O robot pode ser programado para descrever forma geométricas recorrendo a ciclos.
Pode ser introduzida aleatoriedade com operadores lógicos na duração dos ciclos ou nos tempos de ação.
Conjugar ciclos com sensor de ultrassons permite conferir autonomia ao movimento do robot.